现代量子力学笔记1:基本概念
这是樱井纯《现代量子力学》的第一章(基本概念)的课程学习笔记,个人能力有限,如有错误,欢迎指正
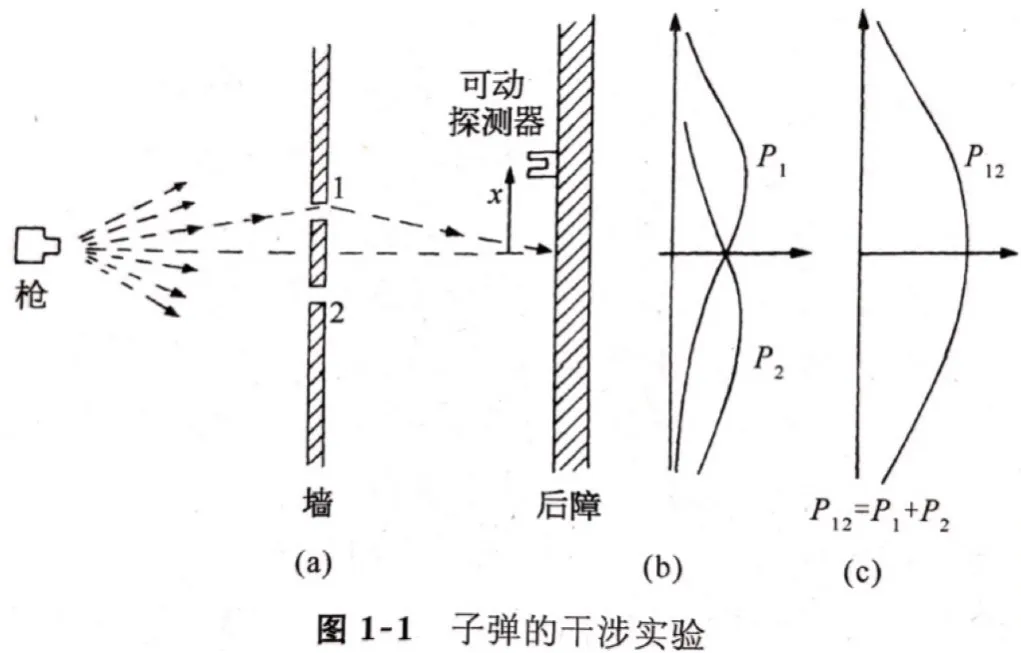
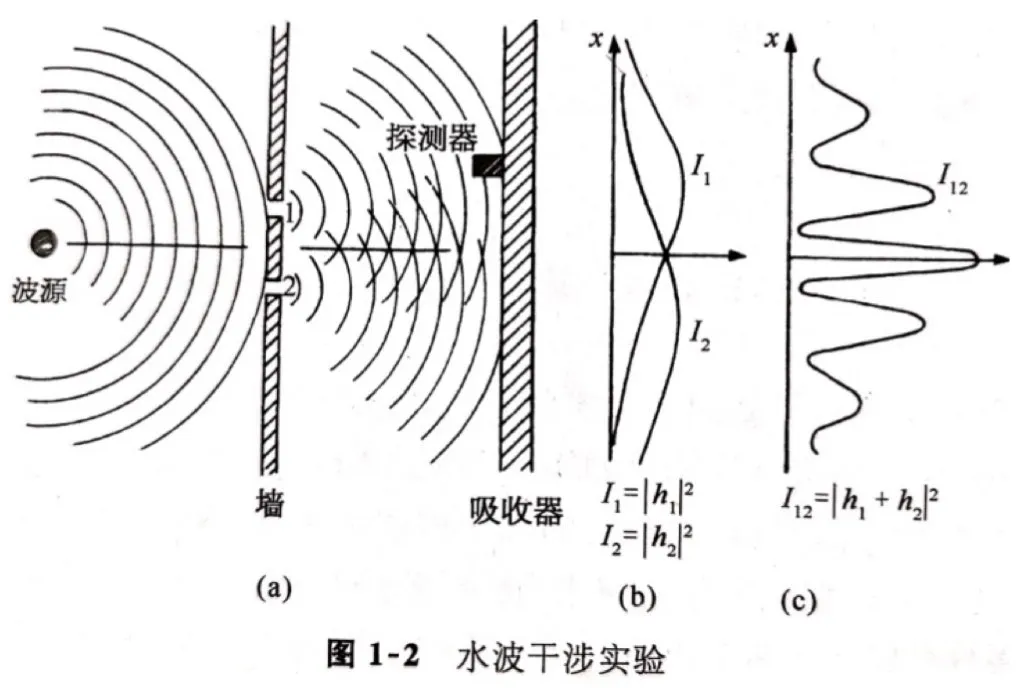
双缝干涉与波粒二象性
- 经典物理中粒子与波在双缝干涉中呈现不同的图像:

pic-1-1 pic-1-2
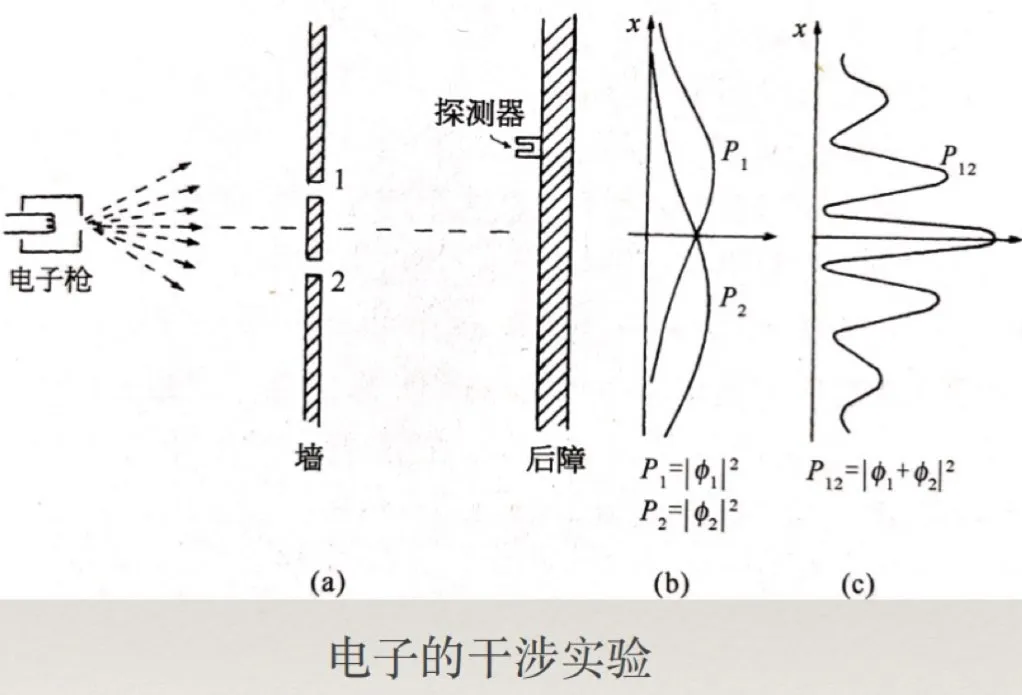
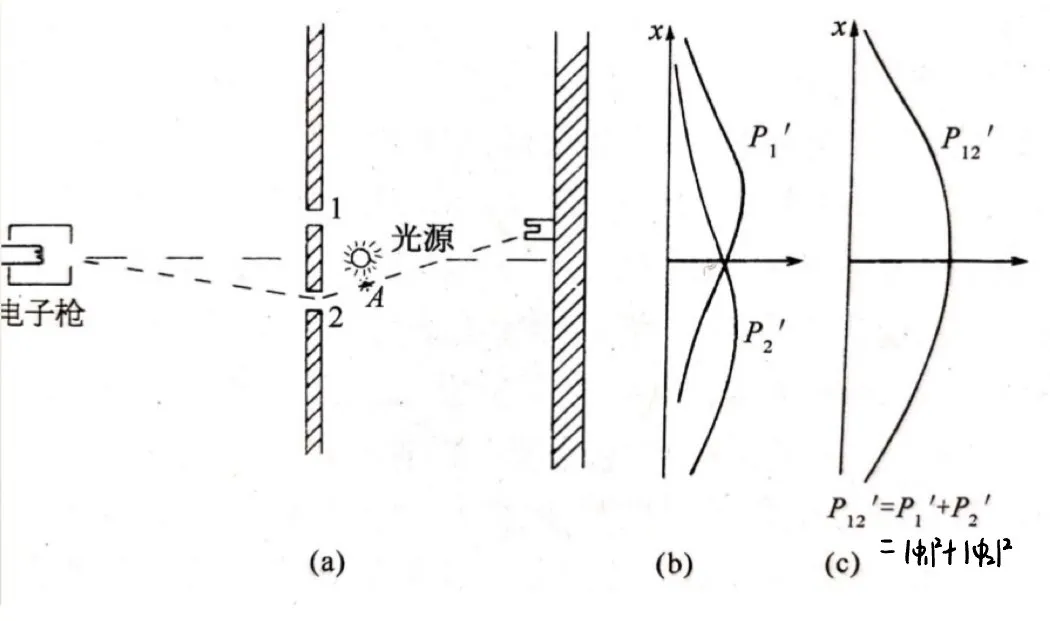
- 但在量子力学中,任何物体都有波粒二象性:
pic-2
pic-3
斯特恩-盖拉赫实验
斯特恩-盖拉赫实验(S-G实验)具体见书上,这里只强调其中一个特殊情况:
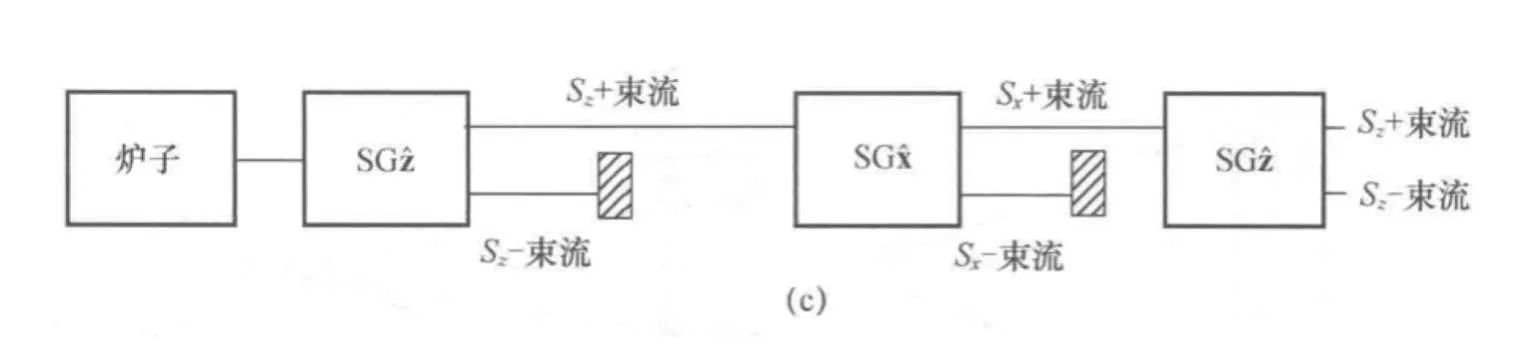
我们给出它在量子力学下的解释:由于 $ [\hat{S}_x,\hat{S}_y]\ne0 $ ,所以两者不能同时确定。但在上图中束流通过第二个仪器后 $ S_x $ 确定,从而 $ S_z $ 不能确定,因此通过第三个仪器后才会出现 $ S_z- $ 束流。
五大公设
樱井纯的书的一个特点是在第一章通过较少的理论以及数学语言来对量子力学公式化,可以说是在重新构建一个量子力学的基础,但是本书对一些量子力学基本假设的给出较为零散,所以这里直接写下量子力学的五大公设以替代,后期若与本书有出入的地方将会指出。
-
算符公设:
任何一个可观测量 $A$ ,都可用相应的线性厄米算符 $\hat{A}$ 表示,同时要求 $\hat{A}$ 的本征态是完备的。
-
波函数公设:
波函数 $|\psi(\textbf{x},t)|^2$ 为粒子在 $ t $ 时刻出现在 $ \textbf{x} $ 处的概率密度,此外:
- 状态必可用波函数表示
- 波函数的概率诠释有随之而来的要求(如归一化,平分可积)
- 状态服从量子态叠加原理
-
测量公设:
若测量一个处于 $ \psi(x,t) $ 态的粒子的可观测量 $ A(x,p) $ ,由算符公设,它可被表示为 $ \hat{A}(x,p) $ ,且测量结果一定是 $ \hat{A} $ 的某个特征值 $ a_n $ ,若 $ \hat{A} $ 的态是分立的,那么得到本征值为 $ a_n $ 的正交归一本征态 $ \left|n\right> $ 的概率为:$ |c_n|^2=|\left<n|\psi\right>|^2 $
若 $ \hat{A} $ 的态是连续的,则 $ |\left<n|\psi\right>|^2 $ 为其概率密度
也就是说测量后,波函数坍塌或抛进到相应的本征态,换句话说, $ \left|\psi\right>\stackrel{\text{测量}}{\longrightarrow}\left|n\right> $ 的概率为 $ |\left<n|\psi\right>|^2 $(前提是:$ \left|\psi\right> $ 与 $ \left|n\right> $ 都是归一的)
-
测量公设与可观测量本征值完备性的关系:
因为 $ \left|n\right> $ 是完备的,所以 $ \left|\psi\right>=\sum _n \left|n\right>\left<n|\psi\right>=\sum _n c_n \left|n\right> $ ,定性地来说 $ c_n $ 告诉了我们 $ \left|\psi\right> $ 含占比多少的 $ \left|n\right> $ ,且测量一次一定给出 $ \hat{A} $ 的一个本征值。
则测量公设的物理意义显现:因为得到某一特定本征值 $ a_n $ 的概率应取决于 $ \left|\psi\right> $ 中 $ \left|n\right> $ 所占到量,又概率应由波函数模平方确定,所以精确度量应为 $ |\left<n|\psi\right>|^2=|c_n|^2 $ 。
同样因为 $ \left|n\right> $ 是完备的,可推出 $ \hat{A} $ 的平均值一定是其本征值 $ a_i $ 乘以对应概率再求和:
$$ \begin{align*} \left<\psi|\hat{A}|\psi\right> &= \sum _{n’} \left<\psi|n’\right>\left<n’\right|\hat{A} \sum _n\left|n\right>\left<n’| \psi\right>\\ &= \sum _n \left<\psi|n\right>\left<n\right|\hat{A} \left|n\right>\left<n|\psi\right> \\ &= \sum _n a_n|\left<\psi|n\right>| ^2 \end{align*} $$
-
-
薛定谔方程公设:
量子力学的运动公式为薛定谔方程: $i \hbar \partial _t \psi =\frac{-\hbar^2}{2m} \nabla^2\psi +V \psi $
-
全同性原理:
如果两个粒子内禀属性全部相同(如质量,电荷,自旋等),我们认为它们是全同的。而这又和微观粒子交换对称性有关:两个全同粒子组合的系统,其概率幅(即$|\psi|^2$)应该是交换对称的,所以系统的波函数$\psi$应该是交换对称或反对称的。而波函数对称的全同粒子称为玻色子,波函数反对称的称为费米子。
右矢、左矢和算符
-
左右矢:
关于Dirac符号,左右矢的性质可以类比行向量与列向量,即满足:可叠加性、数乘和内积为数等。 但是这里要补充一些假定:
- 令零矢量为0,区别于 $ \left.|0\right> $
- 右矢 $ \left|a\right> $ 与 $ \left.c|a\right>(c\ne0) $ 表示同一个物理态
- $ \left<\alpha|\beta\right>=\left<\beta|\alpha\right>^* $
- $ \left<\alpha|\alpha\right>\ge0 $ ,等号仅在零矢量时成立,这个假设称为正定度规假设,对概率解释至关重要。
-
算符:
算符可以类比矩阵,有单位算符、零算符、加法等性质。 但是仍有些性质需要强调:
- 右矢与左矢的外积结果(如 $ |\alpha\left>\right<\beta| $ )为算符
- 结合公理:左矢、右矢与算符之间的“合法”乘积满足结合律
- 至于 $ \left|\alpha\right>\left|\beta\right> $ 这种写法,不能算合法的乘积,但是如果是不同空间的直积就可以这样简写。
基右矢和矩阵表示
本征右矢有正交归一完备性,可以很好地作为基右矢。 规定了基右矢后就可以把算符表示为矩阵,或把任意左或右矢表示为向量。 一般利用基右矢的完备关系式,将其添加至合适的地方,如:
-
对于算符$\hat{X}$有: $$\hat{X}=\sum_n\sum_{n’}\left|n’\right>\left<n’\right|\hat{X}\left|n\right>\left<n\right|$$ 而 $ \left<n’\right|\hat{X}\left|n\right> $ 可以看作是矩阵元,$n’$表行指标,$n$表列指标。 $$X\dot{=} \begin{pmatrix} \left<1\right|\hat{X}\left|1\right> & \left<1\right|\hat{X}\left|2\right> & \cdots \\ \left<2\right|\hat{X}\left|1\right> & \left<2\right|\hat{X}\left|2\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix}$$
其中 $\dot{=}$ 意为“被表示为”
因为懒,所以之后在可分辨的情况下,算符不再逐一标 $\hat{}$
-
而对于某一右矢 $ \left|\alpha\right> $ 有: $$ \left|\alpha\right>=\sum_n\left|n\right>\left<n|\alpha\right>$$ 那么, $$\left|\alpha\right>\dot{=} \begin{pmatrix} \left<1|\alpha\right> \\ \left<2|\alpha\right> \\ \vdots \end{pmatrix}$$
-
对某一左矢 $ \left<\beta\right| $ 则有: $$\left<\beta\right|=\sum_n\left<\beta|n\right>\left<n\right|$$ 那么, $$\left<\beta\right|\dot{=}(\left<\beta|1\right>\ \left<\beta|2\right>\ \cdots)$$
所以,右矢可表示为列向量,而左矢可以表示为行向量。
不确定关系
区分概率振幅与概率之间的关系。
在选择(筛选)测量(即本章开头的斯特恩-盖拉赫实验)中,一种选择测量相当于把投影算符作用到初态。
通过S-G实验结果计算自旋$\frac{1}{2}$系统
当 $ \left|S_x,+\right> $ 态被抛进 $ \left|\pm\right> $ 态时,每个态的概率皆为 $ \frac{1}2 $ ,则 $$|\left<+|S_x,+\right>|=|\left<+|S_x,+\right>|=\frac{1}{\sqrt[]{2}}$$ 于是可以将 $ |\left|S_x,+\right> $ 构造为: $$\left|S_x,+\right>=\frac{1}{\sqrt[]{2}}\left|+\right>+\frac{1}{\sqrt[]{2}}e^{i\sigma_1}\left|-\right>$$ 而 $ |\left|S_x,-\right> $ 态被抛进 $ \left|\pm\right> $ 态有同样结果,且其应该与 $ |\left|S_x,+\right> $ 态正交,则其可被构造为: $$\left|S_x,-\right>=\frac{1}{\sqrt[]{2}}\left|+\right>-\frac{1}{\sqrt[]{2}}e^{i\sigma_1}\left|-\right>$$
则由于在本身表象下$S_x$算符可表示为对角阵,所以
$$ S_x = \frac{\hbar}{2}(|S_x,+\left>\right<S_x,+|-|S_x,-\left>\right<S_x,-|)=\frac{\hbar}{2}[e^{-i\sigma_1}|+\left>\right<-|+e^{i\sigma_1}|-\left>\right<+|] $$
类似地,可以得 $\left|S_y,\pm\right>=\frac{1}{\sqrt[]{2}}\left|+\right>\pm\frac{1}{\sqrt[]{2}}e^{i\sigma_2}\left|-\right>$
$$ S_y =\frac{\hbar}{2}[e^{-i\sigma_2}|+\left>\right<-|+e^{i\sigma_2}|-\left>\right<+|] $$
而为了确定 $\sigma_1,\sigma_2$ ,由 $\left|S_x,+\right>$ 被抛进 $\left|S_y,\pm\right>$ 时的概率为 $\frac{1}{2}$ ,且 $\left|S_x,+\right>$ 换成 $\left|S_x,-\right>$ 结果一致,即 $ |\left<S_y,\pm|S_x,+\right>|=|\left<S_y,\pm|S_x,-\right>|=\frac{1}{\sqrt{2}} $
从而可以得到 $\frac{1}{2}|1\pm e^{i(\sigma_1-\sigma_2)}|=\frac{1}{\sqrt{2}} \ ; \ \sigma_2-\sigma_1=\frac{\pi}{2},-\frac{\pi}{2}$
到此为止还是不能完全解得结果,但是考虑到右手系的各个轴指向,所以为了简单起见不妨取 $ \sigma _1=0 $ ,那么 $\sigma _2=\frac{\pi}{2}$ 。
所以在 $ \hat{S} _z $ 表象下, $$ \hat{S} _x \dot{=} \frac{\hbar}{2} \begin{pmatrix}0 & 1 \\ 1 & 0\end{pmatrix},\hat{S} _y\dot{=}\frac{\hbar}{2} \begin{pmatrix}0 & -i \\ i & 0\end{pmatrix} $$
相容可观测量
两算符相互对易就称它们是相容可观测量(两个量可以同时被观测)。
对于相容可观测量$A$与$B$,有一些观测上的性质:
(1)存在一些态(共同本征态),测量 $A$ 与 $B$ 都有确定的值。
(2)对任意态,能给出同时测量 $A$ 与 $B$ 而得到的一组特定结果的概率。
- 对于非独立的相容可观测量,如 $\hat{B}=f(\hat{A})$ ,则 $\hat{A}$ 的本征态 $ \left|a\right> $ 也是$\hat{B}$的本征态且本征值为$f(a)$。
- 而如果两者不独立,则 $ [A,B]=0\ ,A\left|a\right>=a\left|a\right>,[A,B]\left|a\right>=0\Rightarrow A(B\left|a\right>)=a(B\left|a\right>) $
- 若 $ \left|a\right> $ 恰巧也是 $ B $ 的本征态, $ B\left|a\right>=b\left|b\right> $ ,则 $ \left|a\right> $ 为 $ A,B $ , 的共同本征态,标记为 $ \left|a,b\right> $
- 若 $ \left|a\right> $ 不是 $ B $ 的本征态,则 $ B\left|a\right> $ 与 $ \left|a\right> $ 不同,但属于同一个 $ A $ 的本征值 $ a $ 。 $ \left|a\right> $ 可以表示为 $ B $ 的本征态的叠加 $\left|a\right>=\sum _b C _{ab}\left|a,b\right>$ ,则 $B\left|a\right>=\sum _b C _{ab}b\left|a,b\right>$ 。
所以若两个可观测量 $ A $ 与 $ B $ 相容,则它们有共同本征态 $ \left|a,b\right> $ ,并构成完备集。反之也成立。
来证明一下反之成立
记 $ \left|a,b\right> $ 为共同本征态 $ A\left|a,b\right>=a\left|a,b\right>,B\left|a,b\right>=b\left|a,b\right> $
$ [A,B]\left|a,b\right>=(AB-BA)\left|a,b\right>=(ab-ba)\left|a,b\right>=0 $
对任意右矢 $\left|\alpha \right> = \sum_{a,b}C_{ab}\left|a,b\right>,[A,B]\left|\alpha \right>=\sum_{a,b}C_{ab}[A,B]\left|a,b\right>=0$
即 $ [A,B]=0 $
- 简并:若两个或多个线性独立的 $ A $ 的本征态具有相同的本征值 $ a $ ,那么我们说这些本征态对应的本征值 $ a $ 是简并的。在 $ a $ 简并情况下,常用与 $ A $ 对易的其他可观测量 $ B $ 的本征值来标记并区分 $ a $ 简并的本征态(如上面的 $ \left|a,b\right> $ )。
此外,我们常用独立的对易可观测量的最大集合的集体指标来标记共同本征态,构成完备集(这正是我们在解决现实问题中常用的)。 $$\left| K\right>=\left| a,b,c…\right> \ \ \ \ \ \ \left<K’’|K’\right>=\delta_{a’a’’}\delta_{b’b’’}\delta_{c’c’’}…$$
$$\Sigma_K \left| K\right>\left< K\right|=\Sigma_a\Sigma_b\Sigma_c…\left| a,b,c…\right>\left< a,b,c…\right|=I$$
不相容可观测量(两个量不可同时被观测)或许有共同本征态,但是它们不能构成完备集。
不确定关系(测不准原理)
定义 $ \Delta A \equiv A- \left<A\right> $ 则弥散度(也叫方差) $ \left<(\Delta A)^2\right>=(\left<A^2-2\left<A\right>A+\left<A\right>^2\right>)=\left<A^2\right>-\left<A\right>^2 $
有的书中会定义 $ \Delta A \equiv \sqrt{\left<A^2\right>-\left<A\right>^2} $
则不确定关系为 $ \left<(\Delta A)^2\right>\left<(\Delta B)^2\right> \ge\frac{1}{4}|\left<[A,B]\right>|^2 $
关于不确定关系本书的证明如下:
先引入三个引理
-
引理1:(Schwarz不等式) $ \left<\alpha|\alpha\right>\left<\beta|\beta\right> \ge |\left<\alpha|\beta\right>|^2 $
证明:令 $\left|\gamma\right>=\left|\alpha\right>-\frac{\left<\beta|\alpha\right>}{\left<\beta|\beta\right>}\left|\beta\right>$
由于我们取正的度规,则 $ 0\le \left<\gamma|\gamma\right>\left<\beta|\beta\right>=\left<\alpha|\alpha\right>\left<\beta|\beta\right>-2\left<\beta|\alpha\right>\left<\alpha|\beta\right>+\left<\alpha|\beta\right>\left<\beta|\alpha\right>=\left<\alpha|\alpha\right>\left<\beta|\beta\right>-|\left<\alpha|\beta\right>|^2 $
-
引理2: 厄米算符的期待值为纯实数。
证明: $A=A^\dagger,A\left|\alpha\right>=a\left|\alpha\right>$
那么 $\left<A\right>=\left<\psi |A|\psi\right>=\Sigma _{a’a’’}\left<\psi|a’’\right>\left<a’’ |A|a’\right>\left<a’|\psi\right>=\Sigma _{a’}a’|\left<\psi|a’\right>|^2$
-
引理3: 反厄米算符 $ C=-C^\dagger $ 的期待值是纯虚数。
下面正式开始证明 $ \left<(\Delta A)^2\right>\left<(\Delta B)^2\right> \ge\frac{1}{4}|\left<[A,B]\right>|^2 $ :
令 $ \left|\alpha\right>\equiv\Delta A \left|\right> \ \ , \ \ \left|\beta\right>\equiv\Delta B \left|\right> $
由Schwarz不等式 $ \left<\alpha|\alpha\right>\left<\beta|\beta\right> \ge |\left<\alpha|\beta\right>|^2 \Rightarrow \left<(\Delta A)^2\right>\left<(\Delta B)^2\right> \ge |\left<\Delta A \Delta B\right>|^2 $
而 $ \Delta A \Delta B=\frac{1}{2}[\Delta A, \Delta B]+\frac{1}{2}\{\Delta A ,\Delta B\} $
-
其中 $ [\Delta A, \Delta B]=-[\Delta A, \Delta B]^\dagger $ ,反厄米, $ [\Delta A, \Delta B]=[A,B] $ ,所以 $ \left<[A,B]\right> $ 纯虚。
-
其中 $ \{\Delta A, \Delta B\}=\{\Delta A, \Delta B\}^\dagger $ ,厄米,所以 $\left<\{\Delta A, \Delta B\}\right>$ 纯实。
则 $\left<(\Delta A)^2\right>\left<(\Delta B)^2\right> \ge |\left<\Delta A \Delta B\right>|^2=\frac{1}{4}|\left<[A,B]\right>|^2+\frac{1}{4}|\left<\{\Delta A, \Delta B\}\right>|^2 \ge \frac{1}{4}|\left<[A,B]\right>|^2$
注意 $ \frac{1}{4}|\left<\{\Delta A, \Delta B\}\right>|^2 \ge 0 $ ,所以略去该项只会让不等关系更强
命题得证。
基的变换
表象变换
我们令旧的基为 $ A $ 的本征态集 $\{\left|a^{(i)}\right>\}$ ($A$ 表象) 而新的基为 $ B $ 的本征态集 $\{\left|b^{(i)}\right>\}$ ($B$ 表象) 从旧基变到新基的变换称为基的变换或表象变换,就如同三维空间中的坐标转动。
-
幺正算符:
联想三维坐标转动,在这里我们应该可以找到一个矩阵 $ U $ ,使 $\left|b^{(k)}\right>=U\left|a^{(k)}\right>$
所以该矩阵应该满足: $U^ {\dagger} \left|b^{(k)}\right>=U^{\dagger}U\left|a^{(k)}\right>=\left|a^{(k)}\right>\Rightarrow U^{\dagger}U=UU^{\dagger}=I$ ,这种算符称为幺正算符。但是此时我们还不知道 $ U $ 的具体是啥,但可见下一点。
-
右矢的表象变换:
对任意的一个右矢 $\left|\alpha\right> $ 有, $ \left<b^{(k)}|\alpha\right>=\left<a^{(k)}|U^{\dagger}|\alpha\right>$
从而可以推出 $U^{\dagger}=\Sigma _i |a^{(i)}\left>\right<b^{(i)}|$ ,即 $U=\Sigma _i |b^{(i)}\left>\right<a^{(i)}|$
对于 $\left|\alpha\right>$ 在 $B$ 表象的第k行向量元: $\left<b^{(k)}|\alpha\right>=\Sigma_l \left<a^{(k)}|U^{\dagger}|a^{(l)}\right>\left<a^{(l)}|\alpha\right>$
改写成向量形式即: $$ \begin{pmatrix} \left<b^{(1)}|\alpha\right> \\ \left<b^{(2)}|\alpha\right> \\ \vdots \end{pmatrix}= \begin{pmatrix} \left<a^{(1)}|U^{\dagger}|a^{(1)}\right> & \left<a^{(1)}|U^{\dagger}|a^{(2)}\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix} \begin{pmatrix} \left<a^{(1)}|\alpha\right> \\ \left<a^{(2)}|\alpha\right> \\ \vdots \end{pmatrix} $$
-
算符的表象变换:
对于任意的一个算符 $ X $ 有 $\left<b^{(k)}|X|b^{(l)}\right>=\left<a^{(k)}|U^{\dagger}XU|a^{(l)}\right>$
对于 $ X $ 在 $B$ 表象的第k行第l列的矩阵元: $\left<b^{(k)}|X|b^{(l)}\right>=\Sigma_m\Sigma_n \left<a^{(k)}|U^{\dagger}|a^{(m)}\right>\left<a^{(m)}|X|a^{(n)}\right>\left<a^{(n)}|U|a^{(l)}\right>$
改写成矩阵形式即: $$ \begin{align*} \begin{pmatrix} \left<b^{(1)}|X|b^{(1)}\right> & \left<b^{(1)}|X|b^{(2)}\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix} &= \begin{pmatrix} \left<a^{(1)}|U^{\dagger}|a^{(1)}\right> & \left<a^{(1)}|U^{\dagger}|a^{(2)}\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix} \\ & \times \begin{pmatrix} \left<a^{(1)}|X|a^{(1)}\right> & \left<a^{(1)}|X|a^{(2)}\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix} \\ & \times \begin{pmatrix} \left<a^{(1)}|U|a^{(1)}\right> & \left<a^{(1)}|U|a^{(2)}\right> & \cdots\\ \vdots & \vdots & \ddots \end{pmatrix} \end{align*} $$
定义 $ [U] $ 为算符 $ U $ 在表象 $ A $ 上的矩阵形式,那么上面的这些式子告诉我们,只要知道矩阵 $ [U] $ ,就可以轻易地进行表象间的变换。
-
取迹:
取迹跟表象无关: $ tr(X)=\Sigma_a \left<a|X|a\right>=\Sigma_b \left<b|X|b\right> $
证明: $$ \begin{align*} \Sigma_a \left<a|X|a\right> &=\Sigma_a \Sigma_{b’} \Sigma_b \left<a|b’\right>\left<b’|X|b\right>\left<b|a\right> \\ &=\Sigma_a \Sigma_{b’} \Sigma_b \left<b|a\right>\left<b’|a\right>\left<b’|X|b\right> \\ &=\Sigma_{b’} \Sigma_b \left<b|b’\right>\left<b’|X|b\right> \\ &=\Sigma_b \left<b|X|b\right> \end{align*} $$
其它性质:
$$tr(XY)=tr(YX) \ \ , tr(U^\dagger X U)=tr X $$ $$tr(|a’\left>\right<a’’|)=\delta_{a’a’’} \ \ , tr(|b’\left>\right<a’|)=\left<a’|X|b’\right>$$
对无穷维取迹要小心。
对角化(计算矩阵 $ [U] $ )
接下来我们来考虑如何在旧表象 $ A $ 中找到新的可观测量 $ B $ 的对角表象(即 $ B $ 表象)。 实际就是构建旧表象中的矩阵 $ [U] $
步骤如下:
(1)先求矩阵 $ [B] $ 在旧表象中的本征方程,以获得本征值与相应的本征态。
(2)归一后的本征列矢量按顺序构成 $ [U] $ 矩阵
令 $ [B]’ $ 为算符 $ B $ 在新表象下(即 $ B $ 表象)的矩阵形式。那么很显然 $ [B]’ $ 是个对角阵,对角元是 $ [B] $ 在旧表象本征方程中所解得的本征值,且本征值所对应的对角元顺序取决于构成 $ [U] $ 矩阵时该本征值对应的本征列矢量排列的顺序。
(3)求本征值的过程中若有重根则要用格莱姆-施密特正交归一方法构造正交归一矢量。
$ B $ 为厄米算符的话,其矩阵总能用幺正矩阵对角化。此结论对非厄米矩阵不成立。
-
对上面的第(2)点的简单说明:
矩阵 $ [B] $ 在旧表象中的各本征态可以表示为:
$$ \left|b ^{(k)}\right>=\Sigma _l \left<a ^{(l)}|b ^{(k)}\right> \left|a ^{(l)}\right>\dot{=} \begin{pmatrix} \left<a ^{(1)}|b ^{(k)}\right> \\ \left<a ^{(2)}|b ^{(k)}\right> \\ \vdots \end{pmatrix}$$
而幺正矩阵在旧表象中为: $$ \begin{align*} U=\Sigma_k |b^{(k)}\left>\right<a^{(k)}| &=\Sigma_k\Sigma_m \Sigma_l |a^{(l)}\left>\right<a^{(l)}|b^{(k)}\left>\right<a^{(k)}|a^{(m)}\left>\right<a^{(m)}| \\ &= \Sigma_k \Sigma_l |a^{(l)}\left>\right<a^{(l)}|b^{(k)}\left>\right<a^{(k)}| \\ & \dot{=} \begin{pmatrix} \left<a^{(1)}|b^{(1)}\right> & \cdots & \left<a^{(1)}|b^{(k)}\right> & \cdots\\ \left<a^{(2)}|b^{(1)}\right> & \cdots & \left<a^{(2)}|b^{(k)}\right> & \cdots\\ \vdots & \cdots & \vdots & \ddots \end{pmatrix} \end{align*} $$
可见 $ [U] $ 矩阵的第k列与旧表象中的列向量 $ \left|b^{(k)}\right> $ 一致。
-
幺正等价可观测量:
可以通过 $U=\Sigma_i|b^{(i)}\left>\right<a^{(i)}|$ 构造 $ A $ 的幺正变换 $ UAU^{-1} $ ,称其为 $ A $ 的幺正等价可观测量。
则 $A\left|a^{(l)}\right>=a^{(l)}\left|a^{(l)}\right> \ , \ (UAU^{-1})U\left|a^{(l)}\right>=a^{(l)}(U\left|a^{(l)}\right>) \Rightarrow (UAU^{-1})\left|b^{(l)}\right>=a^{(l)}\left|b^{(l)}\right>$ 。
即 $ UAU^{-1} $ 与 $ A $ 有相同的本征值集,也就是说它们有全同的谱。
位置、动量与平移
连续谱
可观测量不一定都是分立的,有一些可观测量具有连续的本征值。而连续谱本征右矢所张的矢量空间的严格数学是相当不靠谱的,所以这里只直接给出分立本征值到连续情况的推广(若有直接推广不适用的地方再说)。
对连续可观测量 $ \hat{x} $ ,有本征方程: $ \hat{x}\left|x’\right>=x’\left|x’\right> $ ,且其与分立谱的关系如下:
$$\left<a’|a’’\right>=\delta_{a’a’’} \rightarrow \left<x’|x’’\right>=\delta(x’-x’’)$$ $$\Sigma_{a’}|a’\left>\right<a’|=I \rightarrow \int dx’ |x’\left>\right<x’| =I$$ $$\left<a’|A|a’’\right>=a’\delta_{a’a’’} \rightarrow \left<x’’|\hat{x}|x’\right>=x’\delta(x’’-x’)$$
-
位置本征右矢和连续可观测量的测量:
一维位置算符 $\hat{x}\left|x’\right>=x’\left|x’\right>$ 对于从分立到连续( $\left|a’\right> \rightarrow \left|x’\right>$ ),它的概率振幅的模平方不再是概率,而变为概率密度,而且有: $\int _{-\infty} ^{+\infty} dx’ |\left<x’|\alpha\right>|^2 =1=\left<\alpha|\alpha\right>$
三维情况下,我们假定 $ \hat{\vec{x}} $ 它的各个分量相互对易( $ [x_i,x_j]=0 $ )。该假定实际是认为 $ \hat{\vec{x}} $ 的三个分量能在任意精度同时测量,所以它虽是一个假定但也符合实际。
平移
定义无穷小平移算符 $\mathscr {G}(d\vec{x})\left|\vec{x}\right>=\left|\vec{x}+d\vec{x}\right>$
其实上式等号右边应该有一个任意的相因子 $ e^{i\alpha} $ ,但不妨令其为1 。
考察 $ \mathscr {G}(d\vec{x}) $ 对任意右矢 $ \left|\alpha\right> $ 的影响:
$$ \begin{align*} \left|\alpha\right> \rightarrow \mathscr {G}(d\vec{x})\left|\alpha\right>=\mathscr {G}(d\vec{x})\int d\vec{x}|\vec{x}\left>\right<\vec{x}\left|\alpha\right>&=\int d\vec{x}|\vec{x}+d\vec{x}\left>\right<\vec{x}\left|\alpha\right>\\ &=\int d\vec{x}|\vec{x}\left>\right<\vec{x}-d\vec{x}\left|\alpha\right> \end{align*} $$
(1)而概率守恒给该变换带来了幺正性: $$\left<\alpha|\alpha\right>=\left<\alpha|\mathscr {G}^{\dagger}(d\vec{x})\mathscr {G}(d\vec{x})|\alpha\right> \Rightarrow \mathscr {G}^{\dagger}(d\vec{x})\mathscr {G}(d\vec{x})=I$$ (2)结合性(封闭性) $$\mathscr {G}(d\vec{x’’})\mathscr {G}(d\vec{x’})= \mathscr {G}(d\vec{x’}+d\vec{x’’})$$ (3)有逆元 $$\mathscr {G}(-d\vec{x})=\mathscr {G}^{-1}(d\vec{x})$$ (4)存在恒等元 $$\lim\limits_{d\vec{x}\to0} \mathscr {G}(d\vec{x})=I$$ 综上,该变换构成一个群,我们称之为三维平移群。
-
接下来,考虑如何得到 $ \mathscr {G}(d\vec{x}) $ 的具体形式:
我们若令该变换的生成元为幺正算符, $ \mathscr {G}(d\vec{x})=1-i\hat{\vec{K}} \cdot d\vec{x} \ \ ,\hat{\vec{K}}^{\dagger}=\hat{\vec{K}} $ 则上面成群的四点要求全能满足(证明略)。
此外,我们还能找到 $ \hat{\vec{x}} $ 与 $ \hat{\vec{K}} $ 的关系:
$$ \begin{align*} [\hat{x}, \mathscr {G}(d\vec{x})]\left|\vec{x}\right> &=(\vec{x}+d\vec{x})\left|\vec{x}+d\vec{x}\right>-\vec{x}\left|\vec{x}+d\vec{x}\right> \\ &=d\vec{x}\left|\vec{x}+d\vec{x}\right>\approx d\vec{x}\left|\vec{x}\right> \end{align*} $$
上式子中等号成立的原因是因为省略了二级小量。
由于 $ \left|\vec{x}\right> $ 可构成一个完备集,则对易任意右矢上式都应该成立,因此可以得到一个算符恒等式: $$ [\hat{\vec{x}},\mathscr {G}(\vec{x})]=d\vec{x} \\ -i\hat{\vec{x}}\hat{\vec{K}}\cdot d\vec{x}+i\hat{\vec{K}}\cdot d\vec{x}\hat{\vec{x}}=d\vec{x} $$
所以对各个分量有, $ [\hat{x} _i ,\hat{K} _j]=i\delta _{ij} $
注意:本小节中的算符基本都标了 $ \hat{} $ ,但因为懒,下面将省略。
平移生成元是动量
到此为止,我们还是不知道算符 $ \vec{K} $ 的物理意义,但是在经典力学中动量是无穷小平移的生成元,所以我们不妨假设在量子力学中也是如此,量纲不一致就加个 $ \frac{1}{\hbar} $ ,即令 $ \vec{K}=\frac{\vec{p}}{\hbar} $
还有许多的教科书中并不需要假设平移生成元是动量,而是直接从其他方式(如基本量子条件)出发推导得平移生成元是动量。
但实际上都一样,因为若我们采取本方式,那么下面将看到,通过假设平移生成元是动量也可推导出基本的量子条件。
那么可以定义: $ \mathscr {G}(\vec{x})=1-\frac{i\vec{p}\cdot d\vec{x}}{\hbar} $
所以可以推得基本量子条件之一: $ [x_i,p_j]=i\hbar\delta_{ij} $
也可得到位置与动量的不确定度关系为: $ \left<(\Delta x)^2\right>\left<(\Delta p_x)^2\right> \ge \frac{\hbar ^2}{4} $
但是我们一般并不常用无穷小平移而常用有限的平移,这里我们可以认为有限平移是 $ N $ 次无穷小平移的叠加,并令 $ N $ 趋于无穷大,先只考虑 $ x $ 分量(其他的 $ y $ 与 $ z $ 方向类似)则 $$ \mathscr {G}(\Delta x \vec{e} _x)=\lim \limits _{N\to \infty} (1-\frac{ip _x \Delta x}{N \hbar}) = e^{-\frac{ip _x \Delta x}{\hbar}}$$
而较易得到 $ [\mathscr {G}(\Delta y \vec{e} _y),\mathscr {G}(\Delta x \vec{e} _x)]=0 $
即 $ [p_i,p_j]=0 $
与位置算符不同,这里动量算符的对易关系是推出的而不是假设的。
由此对易关系很明显,三维平移群是阿贝尔群。
正则对易关系
$$[x_i,x_j]=0 \ \ ,[p_i,p_j]=0 \ \ ,[x_i,p_j]=i\hbar\delta_{ij}$$ 上面的关系可以称为基本的量子条件(又叫正则对易关系或基本对易关系)。
- 量子泊松括号与经典泊松括号的对应 $$\frac{[\ ,]}{i\hbar} \rightarrow [\ ,] _{classical} \ \ ,[A_i,B_i] _{classical}=\frac{A_i}{\partial x_i}\frac{B_i}{\partial p_i}-\frac{A_i}{\partial p_i}\frac{B_i}{\partial x_i}$$ 两者一致的性质: $$[A,BC]=[A,B]C+B[A,C] $$ $$[A,[B,C]]+[B,[C,A]]+[C,[A,B]]=0 $$
位置和动量空间中的波函数
-
位置空间波函数:
$$ \psi _\alpha(x)=\left<x|\alpha\right> \ \ ,\left<\alpha|\beta\right>=\left<\alpha\right|\int dx |x\left>\right<x|\left. \beta\right>=\int dx \psi ^* _\alpha(x)\psi _\beta(x) $$
$$ \begin{align*} \left<\beta|A|\alpha\right> &=\int dx’ \int dx’’ \left<\beta|x’\right>\left<x’|A|x’’\right> \left<x’’|\alpha\right> \\ &=\int dx’ \int dx’’ \psi^* _\beta(x’)\left<x’|A|x’’\right> \left<x’’|\alpha\right>\psi _\alpha(x’’) \end{align*} $$
-
位置表象中的动量算符:
-
证明方法一:
$$ \begin{align*} (1-\frac{ipdx’}{\hbar}) &=\int dx \ \mathscr {G}(dx’)|x\left>\right<x\left|\alpha\right> \\ &= \int dx |x+dx’\left>\right<x\left|\alpha\right> \\ &= \int dx |x\left>\right<x-dx’\left|\alpha\right> \end{align*} $$
而 $$ \begin{align*} \left<x-dx|\alpha\right> &=\psi_\alpha(x-dx’) \\ &= \psi_\alpha(x)+(x-dx’-x) \partial_x \psi_\alpha(x) \\ &= \left<x|\alpha\right>+dx’ \partial_x \left<x|\alpha\right> \end{align*} $$
我们知道 $\psi_\alpha(x’’) \approx \psi_\alpha(x_0)+(x’’-x_0) \partial_{x’’}\psi_\alpha(x’’)|_{x’’=x_0}$
而若令 $ x_0=x $ , $ x’’=x-dx’ $ ,便是上式的来源。
所以, $ (1-\frac{ipdx’}{\hbar})\left|\alpha\right>=\int dx \left|x\right>(\left<x|\alpha\right>-dx’\partial_x\left<x|\alpha\right>) $
对比上式等号两边,并且两边同时左乘 $ \left<x_1\right| $ 可以得: $ \left<x_1|p|\alpha\right>=-i\hbar\partial_{x_1}\left<x_1|\alpha\right> $
-
证明方法二:
$$\mathscr {G}(dx)\left|x\right>=\left|x+dx\right> \Rightarrow \left<x\right| \mathscr {G}^{\dagger}(dx)=\left<x+dx\right| \Rightarrow \mathscr {G}^{\dagger}(dx)=1+\frac{ipdx}{\hbar}$$ 则$$\left<x\right|+\frac{idx}{\hbar}\left<x\right|p=\left<x+dx\right|$$ $$\left<x|\alpha\right>+\frac{idx}{\hbar}\left<x|p|\alpha\right>=\left<x+dx|\alpha\right>$$
那么
$$ \begin{align*} \left<x|p|\alpha\right> &=-i\hbar \frac{\left<x+dx|\alpha\right>-\left<x|\alpha\right>}{dx} \\ &=-i\hbar\partial_x \left<x|\alpha\right> \end{align*} $$
所以在坐标表象,动量算符可表达为: $ \left<x’|p|x’’\right>–i\hbar\partial_{x’} \delta(x’-x’’) $
-
-
动量空间波函数:
$$\psi_\alpha(p)=\left<p|\alpha\right> \ \ ,\psi_p(x)=\left<x|p\right>$$ 考虑做从坐标表象到动量表象的变换: $ \left<p|\alpha\right>=\int dx \left<p|x\right>\left<x|\alpha\right> $ 为了得到表象变换中的关键 ——转化函数 $ \left<x|p\right> $ ,我们来考虑下面的式子:
$$\left<x|\hat{p}|p\right>=-i\hbar\partial_x\left<x|p\right>=p\left<x|p\right> \Rightarrow \left<x|p\right>=N \ \ \text{exp}(\frac{ipx}{\hbar})$$
其中 $N$ 为归一化系数为 $\frac{1}{\sqrt{2\pi\hbar}}$ (证明略)
所以 $ \psi_\alpha(p)=\frac{1}{\sqrt{2\pi\hbar}}\int dx \ \ \text{exp}(\frac{-ipx}{\hbar}) \psi_\alpha(x) $
三维情况下: $\left<\vec{x}|\vec{p}\right>=(2\pi\hbar)^{-\frac{3}{2}} \ \ \text{exp}(\frac{i\vec{p}\cdot\vec{x}}{\hbar})$